DGPS-based Container Tracking and Management System (DGPS software) is a complex software package that is designed to completely determine a container location by its four parameters, block, slot, row and level.A Differential Global Positioning System device (DGPS) is installed on each RTG crane to obtain satellite and base station signals. The DGPS is equipped to retrieve the latitude and longitude values with RS232 series communication port from DGPS. After an appropriate coordinate translation and rotation, the block and slot numbers can be calculated. Through combining the trolley and hoist encoder values, which are obtained from PLC (Programmable Logic Controller) via RS232 series communication port, the row and level numbers can be calculated. All of the above numbers as well as other important information will be sent to the remote server (CTMS) through TCP/IP socket connection.
To implement the above function, a mapping engine is developed to search the crane block and slot numbers. A real time dynamic filtering algorithm and fuzzy-based determination approach are also designed to reduce the DGPS error and improve the DGPS accuracy. To manage these functions, a friendly user interface called Main Panel is provided to display real time working status and calculation result. Any abnormal operation must be reflected and recorded for further trouble-shooting. In addition, a database system is designed to manage all of operation data, events, and logs, and the report creation interface is provided for users to generate customized reports.
The features are:
Adaptive Real Time Dynamic Filter: provides a stable DGPS value and greatly improve its accuracy. Fuzzy Set Based Determination: determines the slot the RTG
is currently situated at to a high degree of accuracy.
Robust Decision: obtains the level number for over-height containers.
Time Calibration: calibrate computer clock with global GPS time at a regular interval.
Dynamic Display: provides a picture which pinpoints the location of the crane in the port. There is also a display picture showing the trolley and gantry movement
within the container block.
Higher Security Protection: enhances system security with different permission levels, and encryption and decryption.
EXCEL, TXT and PDF Report Creation: enables users to generate an Excel, TXT or PDF-based report instantly.
Multi-driver Supports: supports multi-vendor PLC and DGPS devices.
Functional Modules:
Series and TCP/IP communication modules
Adaptive real time dynamic filter
Fuzzy set inference module
Fault diagnostics module
Report creation module
Database interface module
Mapping engine
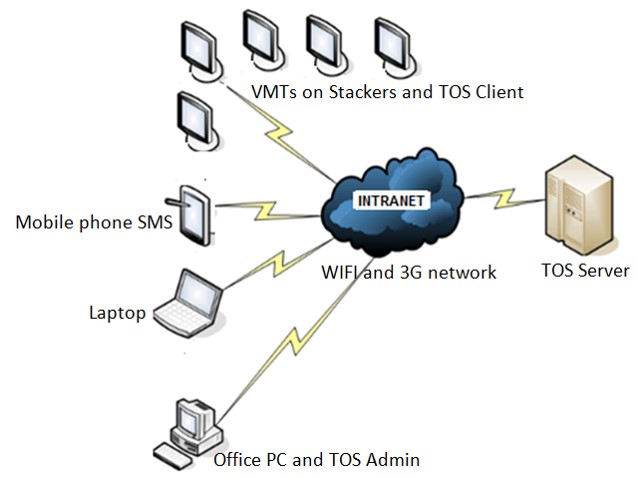
System Architecture:The DGPS program communicates with the PLC and the DGPS device as illustrated in Figure 1. The DGPS coordinate values are received via the DGPS receiver installed on top of the RTG crane as well as from the base station. The DGPS program will then receive data from the PLC and process it. Users will then be able to monitor the movement of the RTG crane via the main panel. Whenever there is a container operation, it will be recorded and stored and sent to the CTMS server.